Hello,
when i try to launch streaming with Anafi. It’s failed with this error:
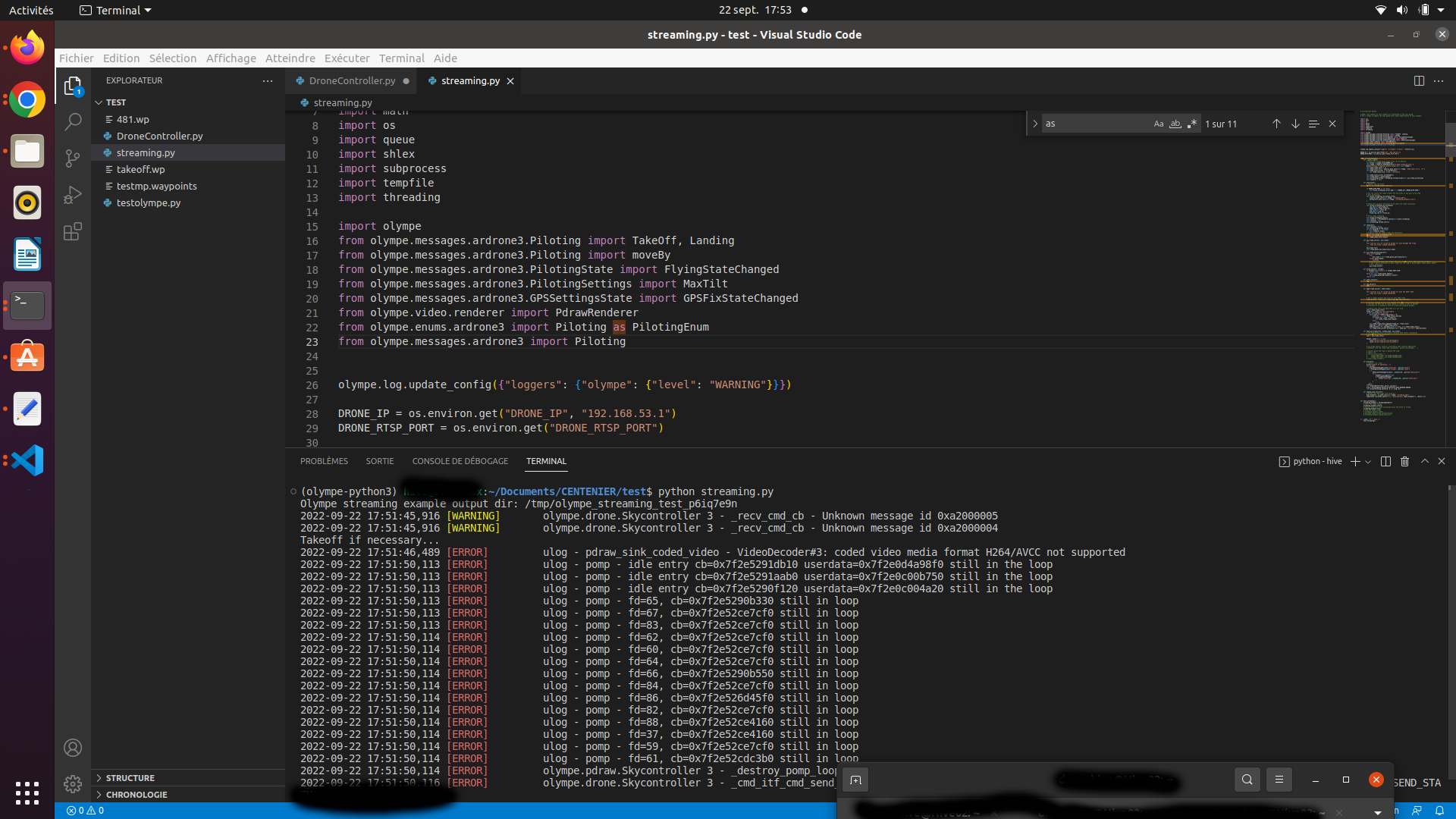
I’m using SykController , Olympe and ubuntu 20.04
I need Help to use streaming with Anafi 4K . Thank
The is my source code:
#!/usr/bin/env python
NOTE: Line numbers of this example are referenced in the user guide.
Don’t forget to update the user guide after every modification of this example.
import csv
import math
import os
import queue
import shlex
import subprocess
import tempfile
import threading
import olympe
from olympe.messages.ardrone3.Piloting import TakeOff, Landing
from olympe.messages.ardrone3.Piloting import moveBy
from olympe.messages.ardrone3.PilotingState import FlyingStateChanged
from olympe.messages.ardrone3.PilotingSettings import MaxTilt
from olympe.messages.ardrone3.GPSSettingsState import GPSFixStateChanged
from olympe.video.renderer import PdrawRenderer
from olympe.enums.ardrone3 import Piloting as PilotingEnum
from olympe.messages.ardrone3 import Piloting
olympe.log.update_config({“loggers”: {“olympe”: {“level”: “WARNING”}}})
DRONE_IP = os.environ.get(“DRONE_IP”, “192.168.53.1”)
DRONE_RTSP_PORT = os.environ.get(“DRONE_RTSP_PORT”)
class StreamingExample:
def init(self):
# Create the olympe.Drone object from its IP address
self.drone = olympe.Drone(DRONE_IP)
self.tempd = tempfile.mkdtemp(prefix=“olympe_streaming_test_”)
print(f"Olympe streaming example output dir: {self.tempd}")
self.h264_frame_stats = []
self.h264_stats_file = open(os.path.join(self.tempd, “h264_stats.csv”), “w+”)
self.h264_stats_writer = csv.DictWriter(
self.h264_stats_file, [“fps”, “bitrate”]
)
self.h264_stats_writer.writeheader()
self.frame_queue = queue.Queue()
self.processing_thread = threading.Thread(target=self.yuv_frame_processing)
self.renderer = None
def start(self):
# Connect the the drone
assert self.drone.connect(retry=3)
if DRONE_RTSP_PORT is not None:
self.drone.streaming.server_addr = f"{DRONE_IP}:{DRONE_RTSP_PORT}"
# You can record the video stream from the drone if you plan to do some
# post processing.
self.drone.streaming.set_output_files(
video=os.path.join(self.tempd, "streaming.mp4"),
metadata=os.path.join(self.tempd, "streaming_metadata.json"),
)
# Setup your callback functions to do some live video processing
self.drone.streaming.set_callbacks(
raw_cb=self.yuv_frame_cb,
h264_cb=self.h264_frame_cb,
start_cb=self.start_cb,
end_cb=self.end_cb,
flush_raw_cb=self.flush_cb,
)
# Start video streaming
self.drone.streaming.start()
self.renderer = PdrawRenderer(pdraw=self.drone.streaming)
self.running = True
self.processing_thread.start()
def stop(self):
self.running = False
self.processing_thread.join()
if self.renderer is not None:
self.renderer.stop()
# Properly stop the video stream and disconnect
assert self.drone.streaming.stop()
assert self.drone.disconnect()
self.h264_stats_file.close()
def yuv_frame_cb(self, yuv_frame):
"""
This function will be called by Olympe for each decoded YUV frame.
:type yuv_frame: olympe.VideoFrame
"""
yuv_frame.ref()
self.frame_queue.put_nowait(yuv_frame)
def yuv_frame_processing(self):
while self.running:
try:
yuv_frame = self.frame_queue.get(timeout=0.1)
except queue.Empty:
continue
# You should process your frames here and release (unref) them when you're done.
# Don't hold a reference on your frames for too long to avoid memory leaks and/or memory
# pool exhaustion.
yuv_frame.unref()
def flush_cb(self, stream):
if stream["vdef_format"] != olympe.VDEF_I420:
return True
while not self.frame_queue.empty():
self.frame_queue.get_nowait().unref()
return True
def start_cb(self):
pass
def end_cb(self):
pass
def h264_frame_cb(self, h264_frame):
"""
This function will be called by Olympe for each new h264 frame.
:type yuv_frame: olympe.VideoFrame
"""
# Get a ctypes pointer and size for this h264 frame
frame_pointer, frame_size = h264_frame.as_ctypes_pointer()
# For this example we will just compute some basic video stream stats
# (bitrate and FPS) but we could choose to resend it over an another
# interface or to decode it with our preferred hardware decoder..
# Compute some stats and dump them in a csv file
info = h264_frame.info()
frame_ts = info["ntp_raw_timestamp"]
if not bool(info["is_sync"]):
while len(self.h264_frame_stats) > 0:
start_ts, _ = self.h264_frame_stats[0]
if (start_ts + 1e6) < frame_ts:
self.h264_frame_stats.pop(0)
else:
break
self.h264_frame_stats.append((frame_ts, frame_size))
h264_fps = len(self.h264_frame_stats)
h264_bitrate = 8 * sum(map(lambda t: t[1], self.h264_frame_stats))
self.h264_stats_writer.writerow({"fps": h264_fps, "bitrate": h264_bitrate})
def show_yuv_frame(self, window_name, yuv_frame):
# the VideoFrame.info() dictionary contains some useful information
# such as the video resolution
info = yuv_frame.info()
height, width = ( # noqa
info["raw"]["frame"]["info"]["height"],
info["raw"]["frame"]["info"]["width"],
)
# yuv_frame.vmeta() returns a dictionary that contains additional
# metadata from the drone (GPS coordinates, battery percentage, ...)
# convert pdraw YUV flag to OpenCV YUV flag
# import cv2
# cv2_cvt_color_flag = {
# olympe.VDEF_I420: cv2.COLOR_YUV2BGR_I420,
# olympe.VDEF_NV12: cv2.COLOR_YUV2BGR_NV12,
# }[yuv_frame.format()]
def fly(self):
# Takeoff, fly, land, ...
print("Takeoff if necessary...")
self.drone(
FlyingStateChanged(state="hovering", _policy="check")
| FlyingStateChanged(state="flying", _policy="check")
| (
GPSFixStateChanged(fixed=1, _timeout=10, _policy="check_wait")
>> (
TakeOff(_no_expect=True)
& FlyingStateChanged(
state="hovering", _timeout=10, _policy="check_wait"
)
)
)
).wait()
self.drone(MaxTilt(40)).wait().success()
orig = PilotingEnum.MoveTo_Orientation_mode.HEADING_DURING
self.drone(Piloting.moveTo(0, 0, 5, orig, 0))
def replay_with_vlc(self):
# Replay this MP4 video file using VLC
mp4_filepath = os.path.join(self.tempd, "streaming.mp4")
subprocess.run(shlex.split(f"vlc --play-and-exit {mp4_filepath}"), check=True)
def test_streaming():
streaming_example = StreamingExample()
# Start the video stream
streaming_example.start()
# Perform some live video processing while the drone is flying
streaming_example.fly()
# Stop the video stream
# streaming_example.stop()
# Recorded video stream postprocessing
# streaming_example.replay_with_vlc()
if name == “main”:
test_streaming()