hello,
I’m following “Hello, Drone!” - 7.5 (installed airsdk-cli) example and I’m able to install mission to simulated drone.

But i don’t know how to properly activate it
I saw that it is possible to upload and activate airsdk missions through ‘Olympe’ (i would prefer this method), but from this example it’s not clear how to make it. Default code not working.
import logging
import olympe
import olympe.log
import os
import pprint
from olympe.controller import Disconnected
from olympe.messages.common.Common import Reboot
from olympe.messages import mission
DRONE_IP = os.environ.get("DRONE_IP", "10.202.0.1")
HELLO_MISSION_URL = os.environ.get("HELLO_MISSION_URL", "com.parrot.missions.samples.hello.tar.gz")
olympe.log.update_config({"loggers": {"olympe": {"level": "INFO"}}})
logger = logging.getLogger("olympe")
def test_hello_mission():
drone = olympe.Drone(DRONE_IP)
with drone.mission.from_path(HELLO_MISSION_URL).open() as hello:
# Mission messages modules are now available from the Python path
from olympe.airsdk.messages.parrot.missions.samples.hello.Command import Say, Hold
from olympe.airsdk.messages.parrot.missions.samples.hello.Event import count
# Mission messages are also available under the Mission.messages dictionary
assert hello.messages["parrot.missions.samples.hello"].Command.Say is Say
assert hello.messages["parrot.missions.samples.hello"].Event.count is count
# Install the 'hello' mission and reboot the drone
assert drone.connect()
assert hello.install(allow_overwrite=True)
logger.info("Mission list: " + pprint.pformat(drone.mission.list_remote()))
assert drone(Reboot() >> Disconnected()).wait()
# Connect to the drone after reboot, load and activate the 'hello' mission
assert drone.connect(retry=5)
assert hello.wait_ready(5)
# wait for the current mission to be activated
mission_activated = drone(mission.state(state="active"))
assert mission_activated.wait(), mission_activated.explain()
logger.info("Mission list: " + pprint.pformat(drone.mission.list_remote()))
# load and activate the hello mission
mission_activated = drone(
mission.load(uid=hello.uid)
>> mission.activate(uid=hello.uid)
)
assert mission_activated.wait(), mission_activated.explain()
# Make the drone say hello (nod its gimbal)
assert drone(Say()).wait()
counter = None
# Wait for 3 nod of the drone gimbal
for i in range(3):
if counter is None:
expectation = drone(count(_policy="wait")).wait(_timeout=10)
assert expectation, expectation.explain()
counter = expectation.received_events().last().args["value"]
else:
counter += 1
expectation = drone(count(value=counter)).wait(_timeout=10)
assert expectation, expectation.explain()
# Stop and disconnect
assert drone(Hold()).wait()
expectation = drone(count(_policy="wait", _timeout=15)).wait()
assert not expectation, expectation.explain()
assert drone(count(value=counter, _policy="check"))
assert drone.disconnect()
if __name__ == "__main__":
test_hello_mission()
Error:
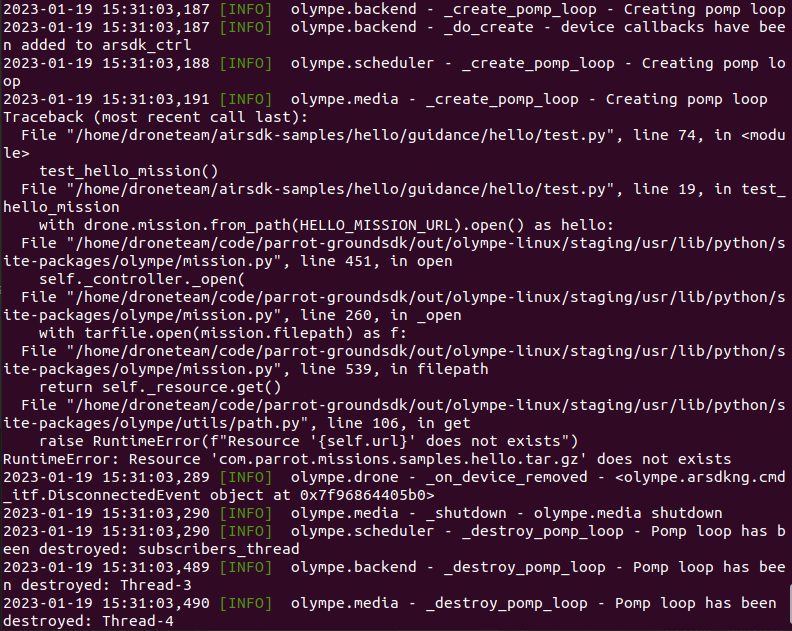
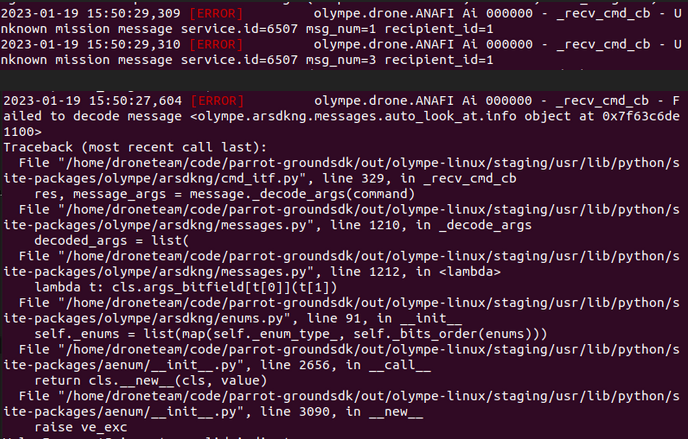
I tried to make little changes only to activate mission, gimbal stared moving, but it went to infint loop (gimbal move every ~10 seconds), and getting errors, code:
import logging
import olympe
import olympe.log
import os
import pprint
from olympe.controller import Disconnected
from olympe.messages.common.Common import Reboot
from olympe.messages import mission
DRONE_IP = os.environ.get("DRONE_IP", "10.202.0.1")
# HELLO_MISSION_URL = os.environ.get("HELLO_MISSION_URL", "com.parrot.missions.samples.hello.tar.gz")
olympe.log.update_config({"loggers": {"olympe": {"level": "INFO"}}})
logger = logging.getLogger("olympe")
def test_hello_mission():
drone = olympe.Drone(DRONE_IP)
# with drone.mission.from_path(HELLO_MISSION_URL).open() as hello:
# Mission messages modules are now available from the Python path
# from olympe.airsdk.messages.parrot.missions.samples.hello.Command import Say, Hold
# from olympe.airsdk.messages.parrot.missions.samples.hello.Event import count
# # Mission messages are also available under the Mission.messages dictionary
# assert hello.messages["parrot.missions.samples.hello"].Command.Say is Say
# assert hello.messages["parrot.missions.samples.hello"].Event.count is count
# # Install the 'hello' mission and reboot the drone
assert drone.connect()
# assert hello.install(allow_overwrite=True)
# logger.info("Mission list: " + pprint.pformat(drone.mission.list_remote()))
# assert drone(Reboot() >> Disconnected()).wait()
# Connect to the drone after reboot, load and activate the 'hello' mission
# assert drone.connect(retry=5)
# # assert hello.wait_ready(5)
# # wait for the current mission to be activated
# mission_activated = drone(mission.state(state="active"))
# assert mission_activated.wait(), mission_activated.explain()
# logger.info("Mission list: " + pprint.pformat(drone.mission.list_remote()))
# load and activate the hello mission
mission_activated = drone(
mission.load(uid="com.parrot.missions.samples.hello")
>> mission.activate(uid="com.parrot.missions.samples.hello")
)
assert mission_activated.wait(), mission_activated.explain()
# Make the drone say hello (nod its gimbal)
assert drone(Say()).wait()
counter = None
# Wait for 3 nod of the drone gimbal
for i in range(3):
if counter is None:
expectation = drone(count(_policy="wait")).wait(_timeout=10)
assert expectation, expectation.explain()
counter = expectation.received_events().last().args["value"]
else:
counter += 1
expectation = drone(count(value=counter)).wait(_timeout=10)
assert expectation, expectation.explain()
# Stop and disconnect
# assert drone(Hold()).wait()
expectation = drone(count(_policy="wait", _timeout=15)).wait()
assert not expectation, expectation.explain()
assert drone(count(value=counter, _policy="check"))
assert drone.disconnect()
if __name__ == "__main__":
test_hello_mission()
Also I would like to add some movements to this mission like takeoff and fly simple squere or something like that. Should i change /airsdk-samples/hello/guidance/hello/hello.py file to achieve that? (Based on documentation citation " Guidance ")