Hi,
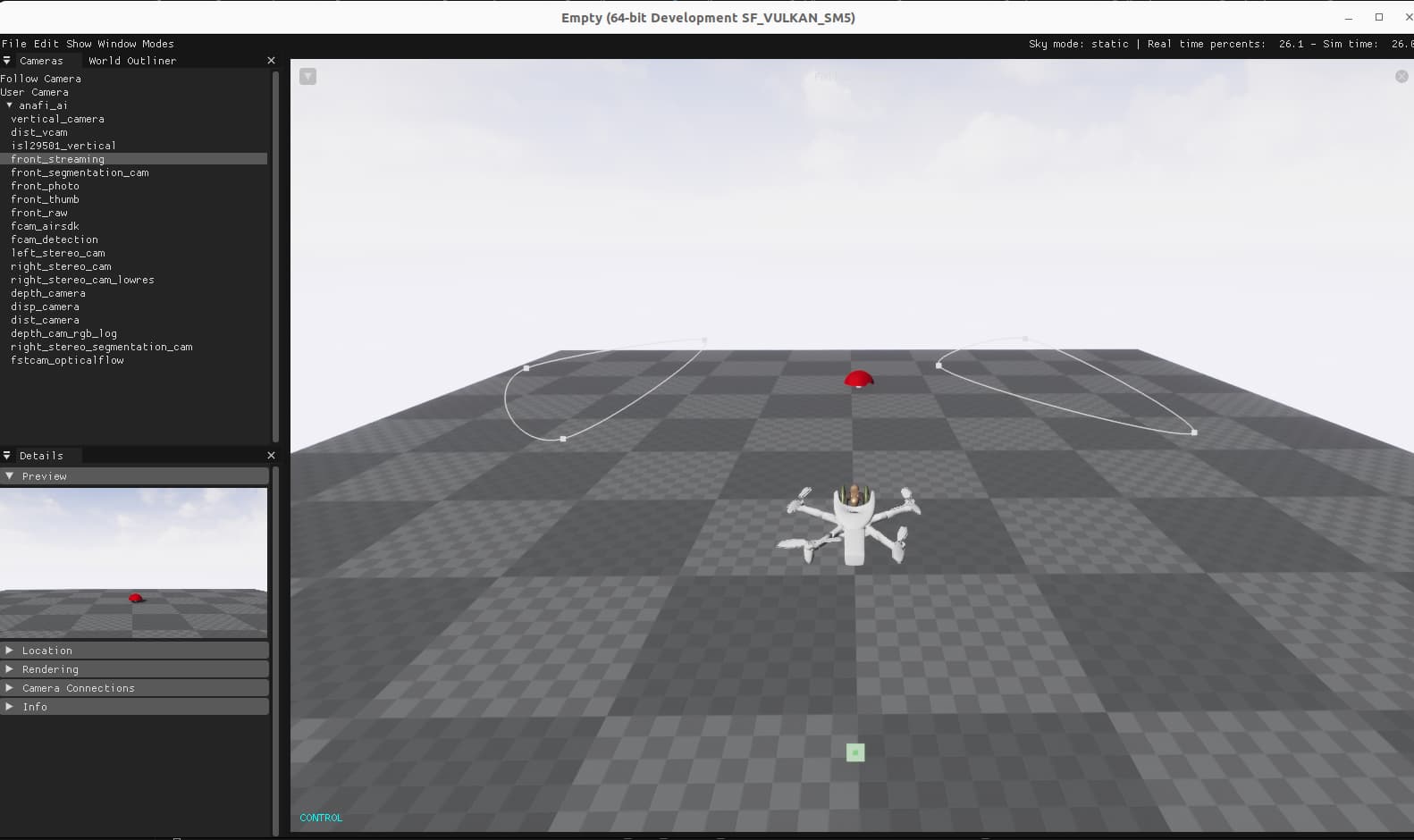
I am trying to detect a red semisphere using the Sphinx simulator. I attached a picture of my environment. For some reason, the red object is never detected. Could you help me? my script:
import os
import queue
import threading
import olympe
import cv2
import numpy as np
from olympe.messages.ardrone3.Piloting import TakeOff, moveBy, Landing
from olympe.messages.ardrone3.PilotingState import FlyingStateChanged
Drone IP (Simulated or Physical)
DRONE_IP = os.environ.get(“DRONE_IP”, “10.202.0.1”)
class RedObjectDetector:
def init(self):
“”“Initialize the drone and frame processing.”“”
self.drone = olympe.Drone(DRONE_IP)
self.frame_queue = queue.Queue(maxsize=10) # Limit queue size
self.running = True
def start(self):
"""Start the drone, stream video, and begin detection."""
self.drone.connect()
self.drone.streaming.set_callbacks(raw_cb=self.yuv_frame_cb)
self.drone.streaming.start()
# Take off and wait until hovering
self.drone(TakeOff() >> FlyingStateChanged(state="hovering", _timeout=10)).wait()
print("Takeoff successful.")
# Move forward by 2 meters to get closer
self.move_forward(2.0)
# Start the frame processing thread
threading.Thread(target=self.process_frames, daemon=True).start()
def stop(self):
"""Stop streaming, land the drone, and disconnect."""
self.running = False
self.drone.streaming.stop()
self.drone(Landing()).wait()
self.drone.disconnect()
cv2.destroyAllWindows()
def move_forward(self, distance):
"""Moves the drone forward by a given distance in meters."""
if self.drone.get_state(FlyingStateChanged)["state"] != "hovering":
print("Drone is not hovering. Cannot execute moveBy command.")
return False
move = self.drone(
moveBy(distance, 0, 0, 0) >> FlyingStateChanged(state="hovering", _timeout=10)
).wait()
if move.success():
print(f"Drone moved forward by {distance} meters.")
return True
else:
print("Failed to move the drone.")
return False
def yuv_frame_cb(self, yuv_frame):
"""Processes video frames from the drone."""
yuv_frame.ref()
cvir = yuv_frame.as_cv_image()
if cvir is not None:
self.frame_queue.put(cvir)
yuv_frame.unref()
def process_frames(self):
"""Continuously processes frames for red object detection."""
while self.running:
if not self.frame_queue.empty():
frame = self.frame_queue.get()
bgr_frame = cv2.cvtColor(frame, cv2.COLOR_YUV2BGR_I420) # Convert YUV to BGR
self.detect_red_object(bgr_frame)
def detect_red_object(self, frame):
"""Detects any red object in the frame."""
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# Define HSV ranges for all shades of red
lower_red1 = np.array([0, 120, 70])
upper_red1 = np.array([10, 255, 255])
lower_red2 = np.array([170, 120, 70])
upper_red2 = np.array([180, 255, 255])
# Create two masks and combine them
mask1 = cv2.inRange(hsv, lower_red1, upper_red1)
mask2 = cv2.inRange(hsv, lower_red2, upper_red2)
full_red_mask = mask1 | mask2 # Combine both masks
# Apply morphological operations to remove noise
kernel = np.ones((5, 5), np.uint8)
full_red_mask = cv2.morphologyEx(full_red_mask, cv2.MORPH_OPEN, kernel)
full_red_mask = cv2.morphologyEx(full_red_mask, cv2.MORPH_CLOSE, kernel)
# Find contours
contours, _ = cv2.findContours(full_red_mask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
if contours:
print("Red object detected!")
cv2.putText(frame, "Red Object Detected!", (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 255, 0), 2)
# Show mask and frame for debugging (optional)
cv2.imshow('Red Mask', full_red_mask)
cv2.imshow('Frame', frame)
cv2.waitKey(1)
if name == “main”:
detector = RedObjectDetector()
try:
detector.start()
while True: # Keep the program running
pass
except KeyboardInterrupt:
detector.stop()