@sibujacob
Is drone an instance of olympe.Drone?
drone = olympe.Drone(IP)
Can you add the entire python script? You can check what members a module has by using dir, so you can try the following in an interactive python session:
$ python
Python 3.8.10 (default, Sep 28 2021, 16:10:42)
[GCC 9.3.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import olympe
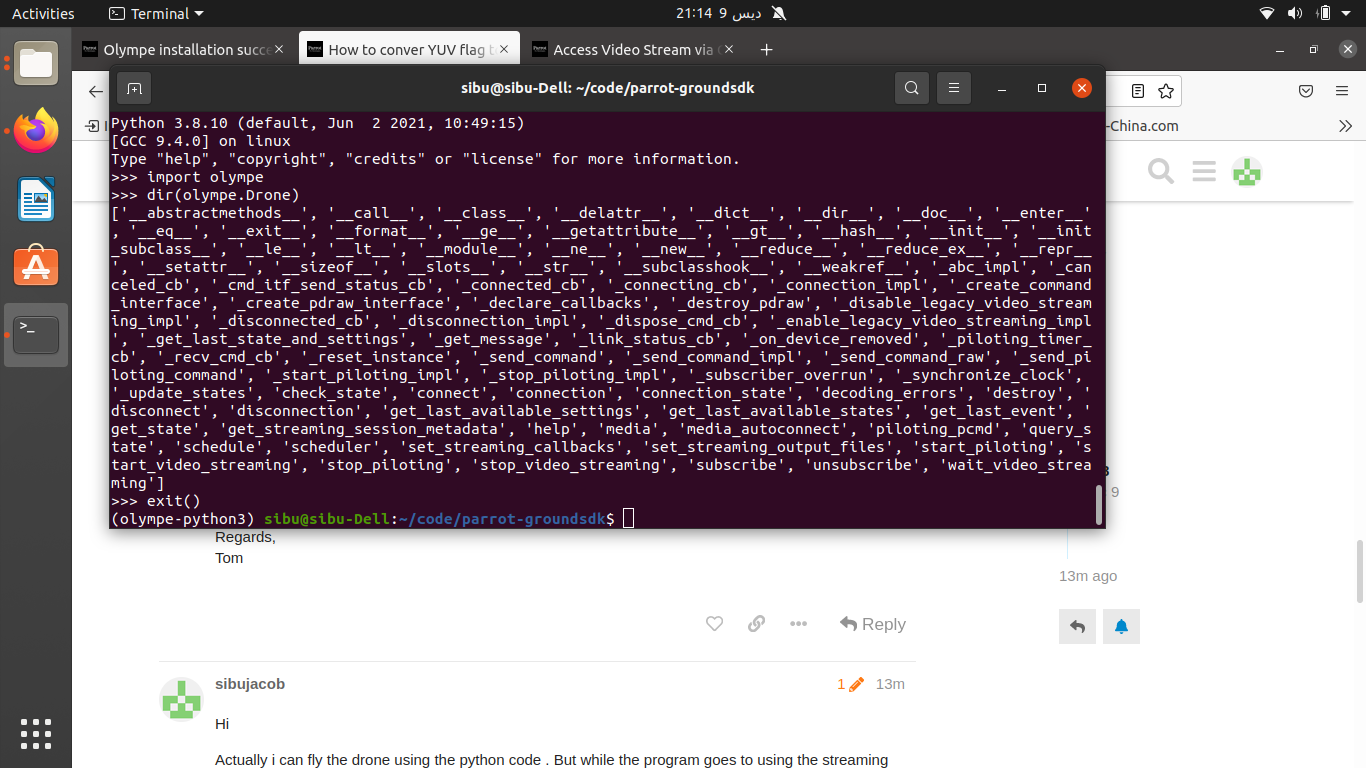
>>> dir(olympe.Drone)
['__abstractmethods__', '__call__', '__class__', '__delattr__', '__dict__', '__dir__', '__doc__', '__enter__', '__eq__', '__exit__', '__format__', '__ge__', '__getattribute__', '__gt__', '__hash__', '__init__', '__init_subclass__', '__le__', '__lt__', '__module__', '__ne__', '__new__', '__reduce__', '__reduce_ex__', '__repr__', '__setattr__', '__sizeof__', '__slots__', '__str__', '__subclasshook__', '__weakref__', '_abc_impl', '_async_discover_device', '_async_get_device', '_canceled_cb', '_cmd_itf_send_status_cb', '_connect_impl', '_connected_cb', '_connecting_cb', '_create_backend', '_create_command_interface', '_create_pdraw_interface', '_declare_callbacks', '_destroy_pdraw', '_disconnected_cb', '_disconnection_impl', '_dispose_cmd_cb', '_dispose_pdraw', '_do_connect', '_get_message', '_link_quality_cb', '_link_status_cb', '_on_connected', '_on_connection_state_changed', '_on_device_removed', '_piloting_timer_cb', '_recv_cmd_cb', '_recv_message_type', '_reset_instance', '_send_command_impl', '_send_command_raw', '_send_piloting_command', '_send_protobuf_command', '_send_states_settings_cmd', '_start_piloting_impl', '_stop_piloting_impl', '_subscriber_overrun', '_synchronize_clock', 'async_connect', 'async_disconnect', 'check_state', 'connect', 'connected', 'connection_state', 'decoding_errors', 'destroy', 'disconnect', 'get_last_event', 'get_state', 'media', 'media_autoconnect', 'mission', 'piloting', 'piloting_pcmd', 'query_state', 'register_message', 'schedule', 'scheduler', 'set_device_name', 'start_piloting', 'stop_piloting', 'streaming', 'subscribe', 'unsubscribe', 'update_logger']
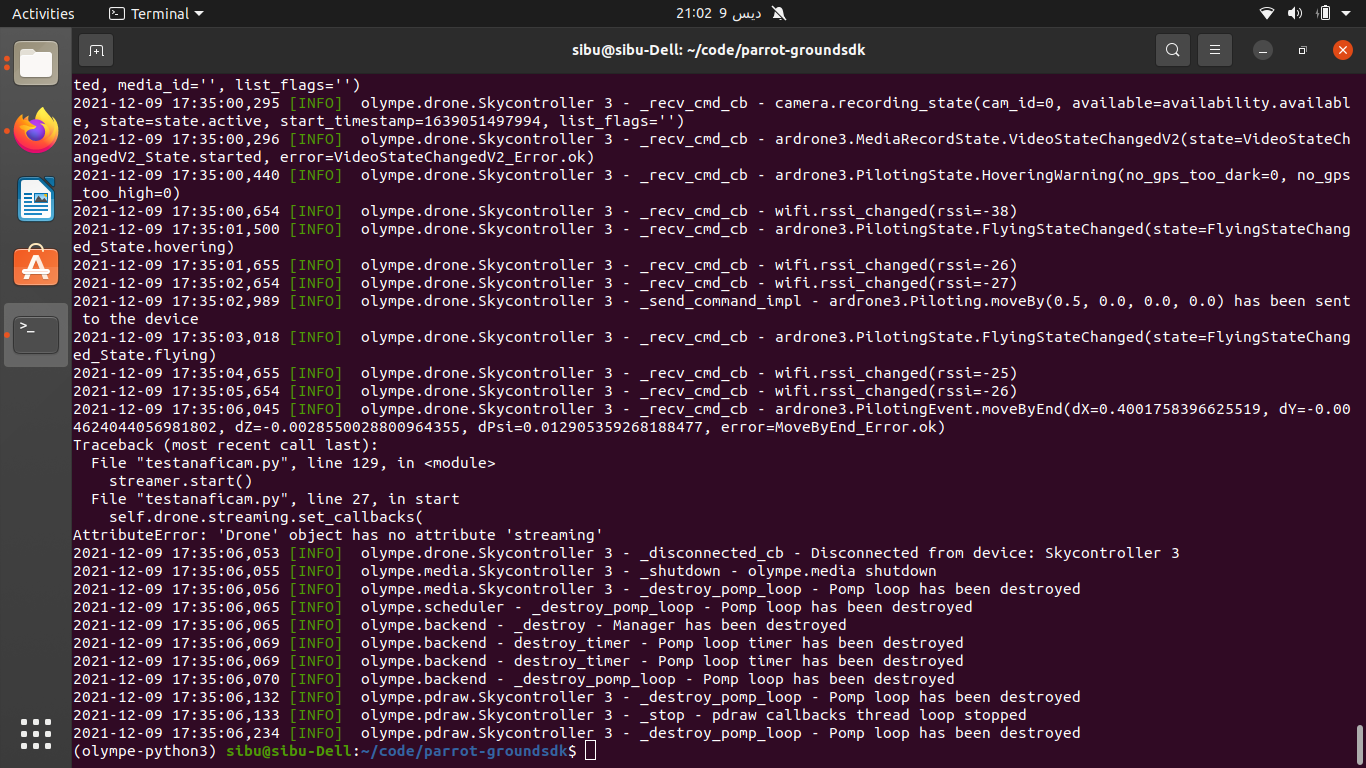
If you see ‘streaming’, then olympe.Drone.streaming exists.
Regards,
Tom