Hi,
I’m trying to control a Mambo in Sphinx without using FreeFlight. I thought of using the handling plugin as said in Tuning of drone internals at runtime - Web Interface and How to make a drone follow scripted trajectories docs.
Firstly I could not open the dashboard using sphinx-dashboard. This issue was easy to work out accessing http://localhost:9002 in my web navigator.
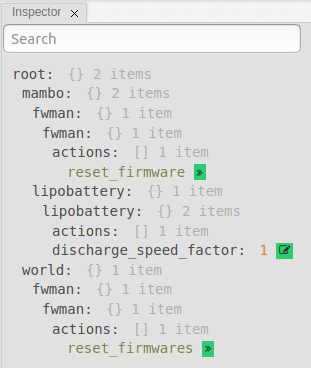
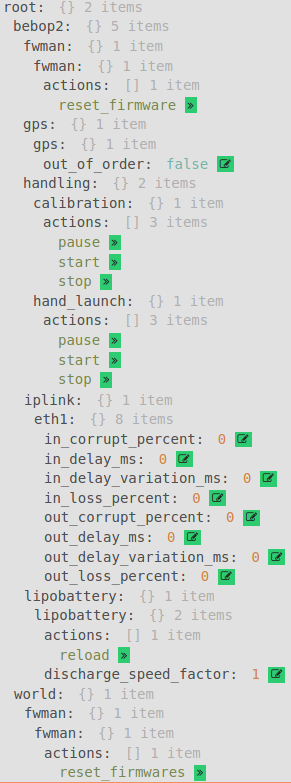
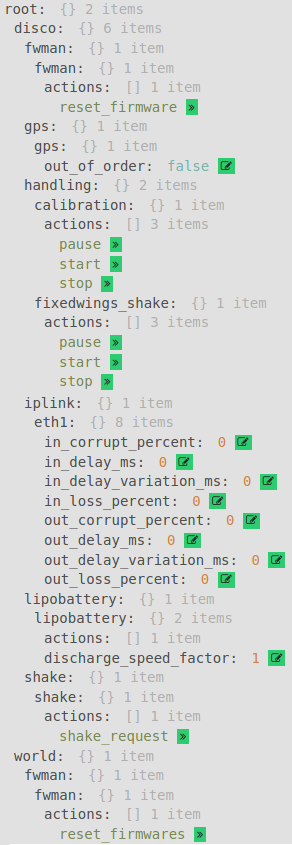
Sadly, for Mambo models, there is no handling script start or stop as for the other drones. The Disco model even has a shaking action. The images below show the differences between the Mambo, Bebop 2 and Disco web interface available actions.
- MAMBO
- BEBOP 2
- DISCO
So, my questions are:
-
Is there a way to add the start (take off) or any move actions to the Mambo simulated drone?
-
If so, where do I add the code? I suppose it must be included in the .drone or .world file
-
If not, do I need to write a new plugin, then compile into a .so file and add to the .drone file?
-
Is there a better method to control the drone without using an external Bluetooth device (using the FreeFlight or Parrot SDK Application)? Would it be possible to publish directly to a gazebo topic or send a TCP package?
At How to make a drone follow scripted trajectories says:
See /internal_transformer for the list of variables provided by Parrot-Sphinx in the expression evaluation context
Is there also a list of available actions? Nevertheless, I could not understand if /internal_transformer was a gazebo topic, a directory or a documentation page. I tried all these options but still did not find it.
Thank you for your attention!