I saw the occupancy grid function in the Guidance documentation.
I was wondering if there is any sample code to use the occupancy grid function in Gudiance and also run in Olympe?
Thanks for the help.
I saw the occupancy grid function in the Guidance documentation.
I was wondering if there is any sample code to use the occupancy grid function in Gudiance and also run in Olympe?
Thanks for the help.
Hi,
If your guidance mode is in:
class YourGuidanceMode(gdnc_core.Mode):
def __init__(self, guidance, name):
super().__init__(guidance, name)
# your code here
# initialize spatial perception
self.spatial_perception = self.guidance.get_spatial_perception()
self.grid = self.spatial_perception.get_grid()
#include "spatial_perception.hpp"
YourMode::YourMode(guidance::Guidance *guidance): Mode(guidance)
{
/* Your constructor here */
}
// Get occupancy grid with this line
const moser::IGrid &grid = mGuidance->getSpatialPerception()->getGrid();
Actually, retrieving occupancy grid has not yet been supported in Olympe but you can access to streaming of disparity map with PDraw
Hi, thanks for the reply.
So it means I can’t see the image like this photo in Sphinx system?
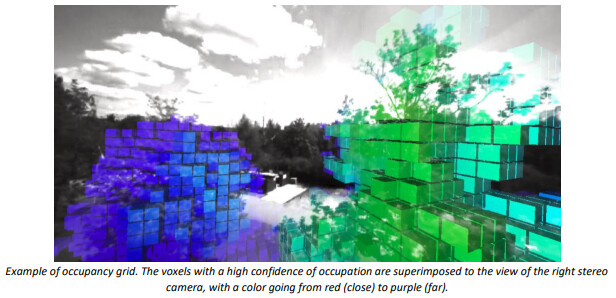
Is disparity map streaming using PDraw the same concept as this image?
Thanks for the help.
This topic was automatically closed after 30 days. New replies are no longer allowed.