We a custom AirSDK mission. After 3-4 landings, we observe that mission is not working properly. Is it related with caches still having some values? How can we reset and kill working processes after landing?
Any recommendation?
1 Like
Hi @Vulture151,
Can you provide more details about your mission ? Do you usr a custom guidance mode or Fsup stage ?
Regards,
Axel
Copyright (c) 2023 Parrot Drones SAS
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions
are met:
* Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
* Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in
the documentation and/or other materials provided with the
distribution.
* Neither the name of the Parrot Company nor the names
of its contributors may be used to endorse or promote products
derived from this software without specific prior written
permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
“AS IS” AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
PARROT COMPANY BE LIABLE FOR ANY DIRECT, INDIRECT,
INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT
OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF
SUCH DAMAGE.
from fsup.genstate import State, guidance_modes
import guidance.descent_pb2 as gdnc_descent_msgs
from fsup.missions.default.uid import UID
from fsup.missions.default.landing.normal import (
Descent as DefaultDescent,
)
import os
import cfgreader
import colibrylite.estimation_mode_pb2 as cbry_est
from fsup.missions.default.features.precise_home_manager import (
PreciseHomeManager,
)
from fsup.missions.default.landing.normal import (
Descent as DefaultDescent,
)
_PRECISE_MODE_NAME = UID + “.descent”
@guidance_modes(“com.parrot.missions.default.descent_to_ground”)
class PreciseHomeDescent(DefaultDescent):
def init(self, *args, **kwargs):
super().init(*args, **kwargs)
self.gdnc_dsc_svc = None
# ---------------------------Get precise Home manager
self.phome_manager = self.mission.get_manager(
PreciseHomeManager, create_if_needed=True
)
# ---------End of precise get home manager--------------------------------------
# To enable descent precise home
self.landing_type = gdnc_descent_msgs.TYPE_DEFAULT
def enter(self, msg):
# self.phome_manager = self.mission.get_manager(PreciseHomeManager, True)
# To enable descent precise home
self.landing_type = gdnc_descent_msgs.TYPE_DEFAULT
if (
self.phome_manager is not None
and not self.phome_manager.is_move_already_interrupted()
):
# Start precise home manager and find target
# self.phome_manager.start_process()
if self.phome_manager.is_target_found():
self.log.info("TARGET FOUND")
self.landing_type = gdnc_descent_msgs.TYPE_DEFAULT_PRECISE
self.phome_manager.set_move_in_progress(True)
self.set_guidance_mode(
UID + ".descent_to_ground",
gdnc_descent_msgs.Config(
type=self.landing_type,
target_type=gdnc_descent_msgs.TARGET_TYPE_GROUND,
),
)
# You should call self.phome_manager.stop_process() in exit() of your state
# in order to make precise home manager ready for the next takeoff
self.mc.dctl.cmd.sender.set_estimation_mode(cbry_est.LANDING)
self.log.info("PRECISE LANDING FINAL")
# KILL MANAGER
# def step(self, msg):
# self.log.info("takeoff - ascent - Step - Enter")
# self.log.info(msg)
# self.log.info("takeoff - ascent - Step - Exit")
def exit(self, msg):
self.phome_manager.stop_process()
self.phome_manager = None
self.log.info("PRECISE LANDING completed")
self.log.info("PRECISE LANDING EXIT - EXIT")
PRECISE_HOME_DESCENT_STATE = {
“name”: “precise_home_descent”,
“class”: PreciseHomeDescent,
}
this is final landing. It is landing precisely.
TRANSITIONS = [
# Overwritten transitions
[
Dctl("motors_ramping_done"),
"takeoff.normal.wait_ascent",
"takeoff.takeoff_to_photo.ascent",
],
[
Dctl("motors_ramping_done"),
"takeoff.normal.wait_motor_ramping",
"takeoff.takeoff_to_photo.ascent",
],
# New transitions
[
GdncAscent("done"),
"takeoff.takeoff_to_photo.ascent",
"takeoff.takeoff_to_fire.ascent",
],
[
GdncAscent("done_without_immobility"),
"takeoff.takeoff_to_photo.ascent",
"takeoff.takeoff_to_fire.ascent",
],
[
GdncAscent("done"),
"takeoff.takeoff_to_fire.ascent",
"flying.firewaypoints",
],
[
GdncAscent("done_without_immobility"),
"takeoff.takeoff_to_fire.ascent",
"flying.firewaypoints",
],
[
FireMission("cl_takeoff"),
"ground.idle",
"takeoff.normal",
],
[
FireMission("cl_fly_home"),
"hovering",
"flying.flyhome",
],
[
FireMission("cl_fly_to"),
"hovering",
"flying.fireflytopath",
],
[
FireMission("cl_fly_circle_position"),
"hovering",
"flying.firecycle",
],
` [` ` MissionFlightPlan("done"),` ` "flying.firewaypoints",` ` "hovering",` ` ],` ` [` ` MissionFlightPlan("done"),` ` "flying.fireflytopath",` ` "hovering",` ` ],` ` [` ` MissionFlightPlan("done"),` ` "flying.flyhome",` ` "flying.precise_home_search",` ` ],` ` [` ` GdncDescent("done"),` ` "flying.precise_home_search",` ` "flying.precise_home_search_final",` ` ],` ` [` ` GdncDescent("done"),` ` "flying.precise_home_search_final",` ` "landing.precise_home_descent",` ` ],` ` [` ` Dctl("landed_detected"),` ` "landing.precise_home_descent",` ` "landing.normal.stopping_motors",` ` ],` ` # [` ` # Dctl("done"),` ` # "landing.precise_home_descent",` ` # "ground.idle",` ` # ],` ` [` ` MissionFlightPlan("done"),` ` "flying.firecycle",` ` "hovering",` ` ],`
]
Thanks for you code.
What kind of wrong drone behavior are you talking about when you say that mission is not working properly? What is your problem?
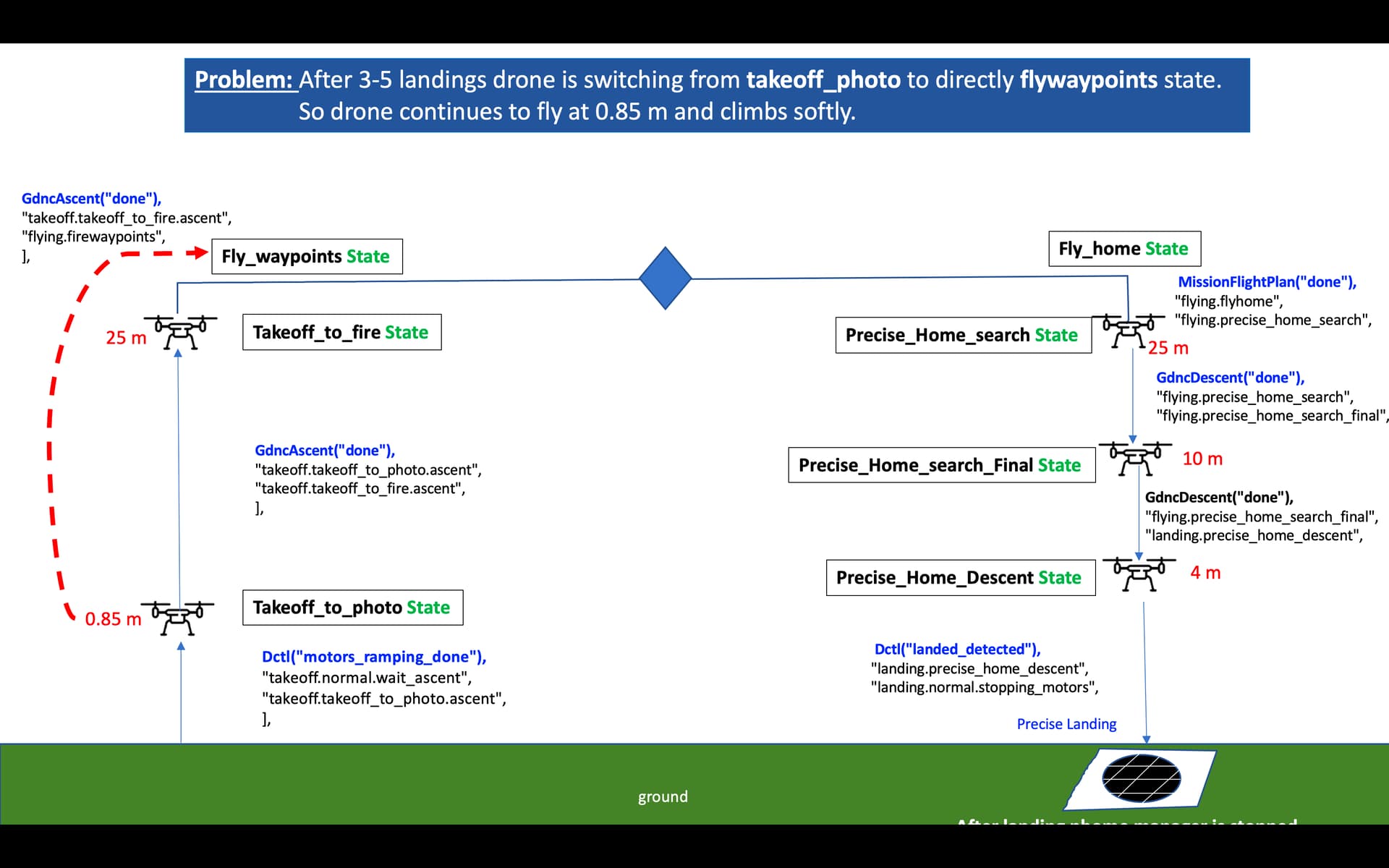
I think I have found the error. I was stopping precise home manager after that I was assigning none to phome_manager object. this was crashing code after landing. If we dont reboot then drone takes off with a crashed airsdk.Commented out and solved.
self.phome_manager.stop_process()
#self.phome_manager = None
But If I make a second take off when drone comes back for Precise landing it can not find the pad. What do we need to make precise landing available for second take off? Is stop_process not enough? what is ground.reset state? do we need that?
Hi Axelm,
After landing if I make another takeoff , Phome_manager is not finding the target in the second landing. I stop the phome_manager after exiting landing stage. What am I missing?
Code for exit part of landing is as follows:
def exit(self, msg):
-
try:* -
self.phome_manager.stop_process()* - except:*
-
self.log.info("Problem with stopping phome_manager.stop_process()")*
This topic was automatically closed after 30 days. New replies are no longer allowed.