QGC’s return should be equal to PX4_CUSTOM_SUB_MODE_AUTO_RTL(use mavlink)
Use QGC Return.
It is normal for the drone to be far from home.
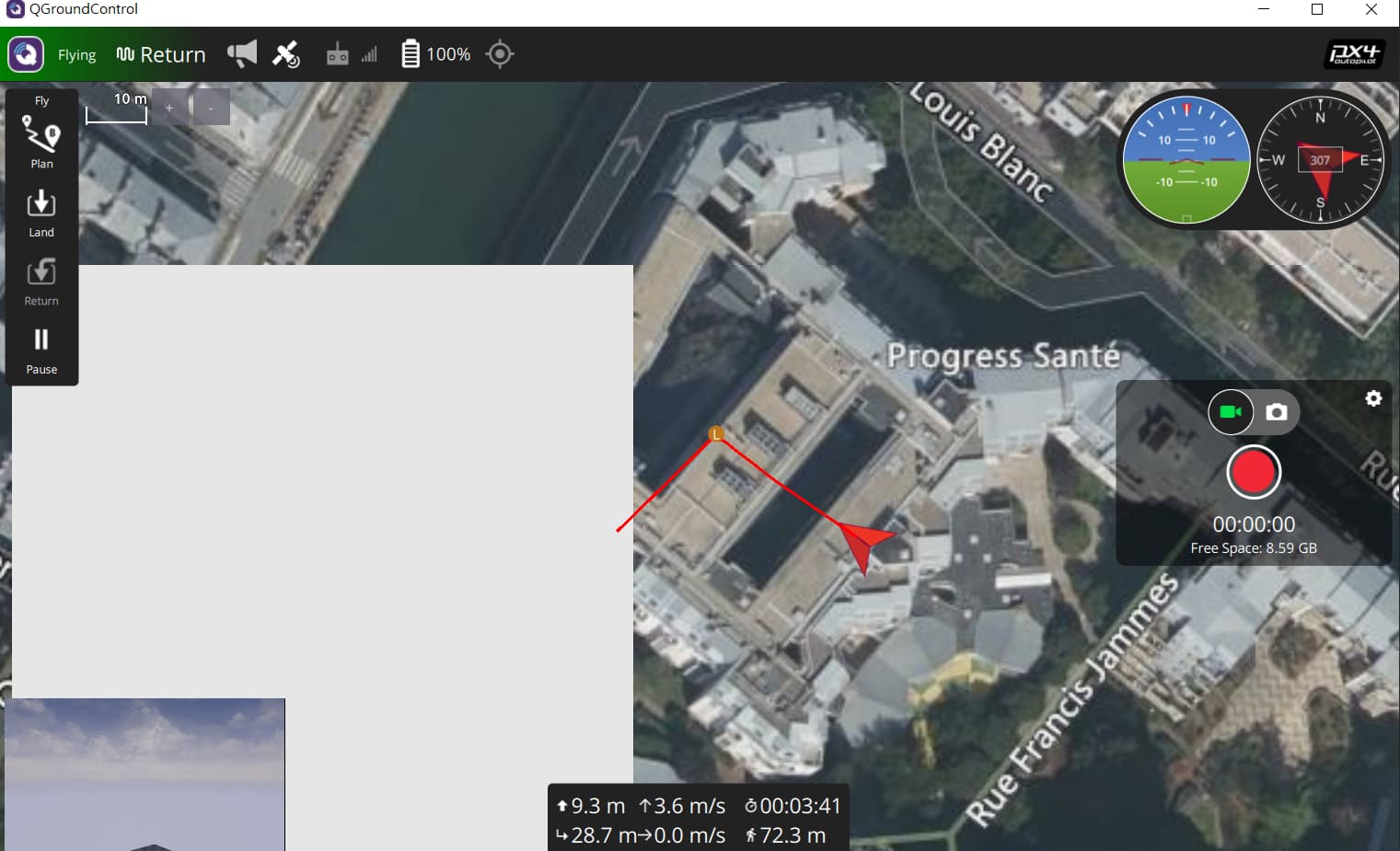
this distance can go home
but this distance is not work.
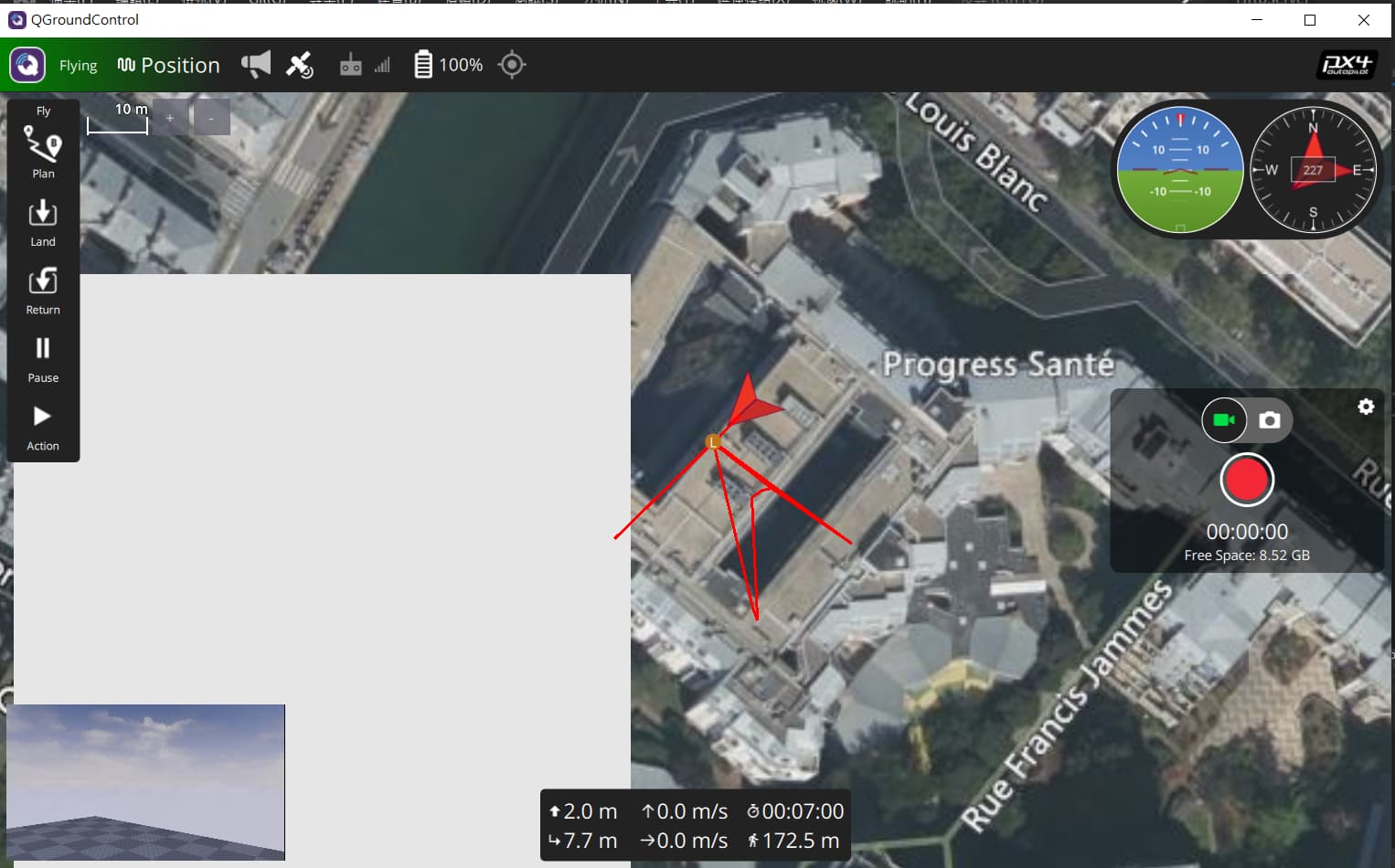
Only rotate yaw, no going home.
Is there a minimum distance?
Can it be set or removed?
thanks.