When modifying the example telemetry_py service to collect more telemetry data such as pitch/yaw/roll/altitude, I am able to get it running but it does not seem like altitude is updating and when logged, never changes from 0.0
async def service_main():
# Initialisation code
ulog.setup_logging(PROCESS_NAME)
logger = logging.getLogger("main")
run = True
def sig_handler(*_):
nonlocal run
run = False
loop = asyncio.get_running_loop()
loop.add_signal_handler(signal.SIGTERM, sig_handler)
# Setup Consumer
consumer = telemetry_binding.Consumer("/dev/shm")
# Setup Sensors
pressure = telemetry_binding.types.float32_t(0.0)
temperature = telemetry_binding.types.array_float32_t(0.0, 10)
altitude = telemetry_binding.types.float32_t(0.0)
drone_attitude = telemetry_binding.types.array_float32_t(0.0, 4)
camera_attitude = telemetry_binding.types.array_float32_t(0.0, 4)
consumer.reg(pressure, "sensors_barometer.pressure")
consumer.reg(temperature, "sensors_imu.temperature")
consumer.reg(altitude, "flight_controller.altitude_agl")
consumer.reg(drone_attitude, "attitude_ned_q")
consumer.reg(camera_attitude, "fcam@eis@video.view_ned_start_q")
consumer.regComplete()
# Loop Code
while run:
consumer.getSample(
telemetry_binding.types.timespec(0, 0),
telemetry_binding.Method.Latest,
)
PATH_GUIDANCE = "/mnt/user-internal/missions-data/com.parrot.missions.samples.telemetry_py/telemetry_service.txt" #new
with open(PATH_GUIDANCE, 'a') as file:#new
file.write(f"Telemetry Data:\n")
file.write(f"Pressure: {pressure}\n")#new
file.write(f"Temperature: {temperature[0]}\n")#new
file.write(f"Altitude: {altitude}\n")
file.write(f"Drone Orientation: {drone_attitude[0]:.10f}, Yaw: {drone_attitude[1]:.10f}, Roll: {drone_attitude[10]:.10f}\n")
file.write(f"Camera Orientation: {camera_attitude[0]:.10f}, Yaw: {camera_attitude[1]:.10f}, Roll: {camera_attitude[10]:.10f}\n")
file.write("------------------------------------------------\n")
await asyncio.sleep(5)
Am I doing something wrong in the service? Do these telemetry points not update unless the drone is in flying mode or something along those lines? Help appreciated.
Axelm
November 14, 2023, 12:34pm
2
HI @kaeladair ,
I think you register the wrong value.
consumer.reg(altitude, "flight_controller.altitude_agl")
consumer.reg(drone_attitude, "attitude_ned_q")
Here are the corrected lines:
consumer.reg(altitude, "drone_controller.altitude_agl")
consumer.reg(drone_attitude, "drone_controller.attitude_ned_q")
As a reminder, to obtain values from telemetry, you need to enter the full name of the data (section_name + data_name). All data available in telemetry can be found in this documentation .
I fixed the errors and I am still getting the same result. Here is my full service code:
import asyncio
import logging
import signal
import ulog
import telemetry_binding
# This is limited to 15 charecters
PROCESS_NAME = b"ex_tlm_py"
async def service_main():
# Initialisation code
ulog.setup_logging(PROCESS_NAME)
logger = logging.getLogger("main")
run = True
def sig_handler(*_):
nonlocal run
run = False
loop = asyncio.get_running_loop()
loop.add_signal_handler(signal.SIGTERM, sig_handler)
# Setup Consumer
consumer = telemetry_binding.Consumer("/dev/shm")
# Setup Sensors
pressure = telemetry_binding.types.float32_t(0.0)
temperature = telemetry_binding.types.array_float32_t(0.0, 10)
altitude = telemetry_binding.types.float32_t(0.0)
drone_attitude = telemetry_binding.types.array_float32_t(0.0, 4)
camera_attitude = telemetry_binding.types.array_float32_t(0.0, 4)
consumer.reg(pressure, "sensors_barometer.pressure")
consumer.reg(temperature, "sensors_imu.temperature")
consumer.reg(altitude, "drone_controller.altitude_agl")
consumer.reg(drone_attitude, "drone_controller.attitude_ned_q")
consumer.reg(camera_attitude, "fcam@eis@video.view_ned_start_q")
consumer.regComplete()
# Loop Code
while run:
consumer.getSample(
telemetry_binding.types.timespec(0, 0),
telemetry_binding.Method.Latest,
)
PATH_GUIDANCE = "/mnt/user-internal/missions-data/com.parrot.missions.samples.telemetry_py/telemetry_service.txt" #new
with open(PATH_GUIDANCE, 'a') as file:#new
file.write(f"Telemetry Data:\n")
file.write(f"Pressure: {pressure}\n")#new
file.write(f"Temperature: {temperature[0]}\n")#new
file.write(f"Altitude: {altitude}\n")
file.write(f"Drone Orientation: {drone_attitude[0]:.10f}, Yaw: {drone_attitude[1]:.10f}, Roll: {drone_attitude[10]:.10f}\n")
file.write(f"Camera Orientation: {camera_attitude[0]:.10f}, Yaw: {camera_attitude[1]:.10f}, Roll: {camera_attitude[10]:.10f}\n")
file.write("------------------------------------------------\n")
await asyncio.sleep(5)
# Cleanup code
logger.info("Cleaning up")
consumer = None
return 0
def main():
asyncio.run(service_main())
And here is the script for running the service with olympe (just the service, empty mission):
import logging
import olympe
import olympe.log
import os
from olympe.messages import mission
DRONE_IP = os.environ.get("DRONE_IP", "192.168.42.1")
# hello mission
# telemetry test mission
HELLO_MISSION_URL = os.environ.get("HELLO_MISSION_URL", "/home/intemnets-lab/kael/airsdk-samples/telemetry_py/.airsdk/out/telemetry_py-classic/images/com.parrot.missions.samples.telemetry_py.tar.gz")
olympe.log.update_config({"loggers": {"olympe": {"level": "WARNING"}}})
logger = logging.getLogger("olympe")
def test_hello_mission():
drone = olympe.Drone(DRONE_IP)
with drone.mission.from_path(HELLO_MISSION_URL).open() as m:
assert drone.connect()
mission_activated = drone(
mission.load(uid=m.uid)
>> mission.activate(uid=m.uid)
)
assert mission_activated.wait(), mission_activated.explain()
input("Press to stop...")
assert drone.disconnect()
if __name__ == "__main__":
test_hello_mission()
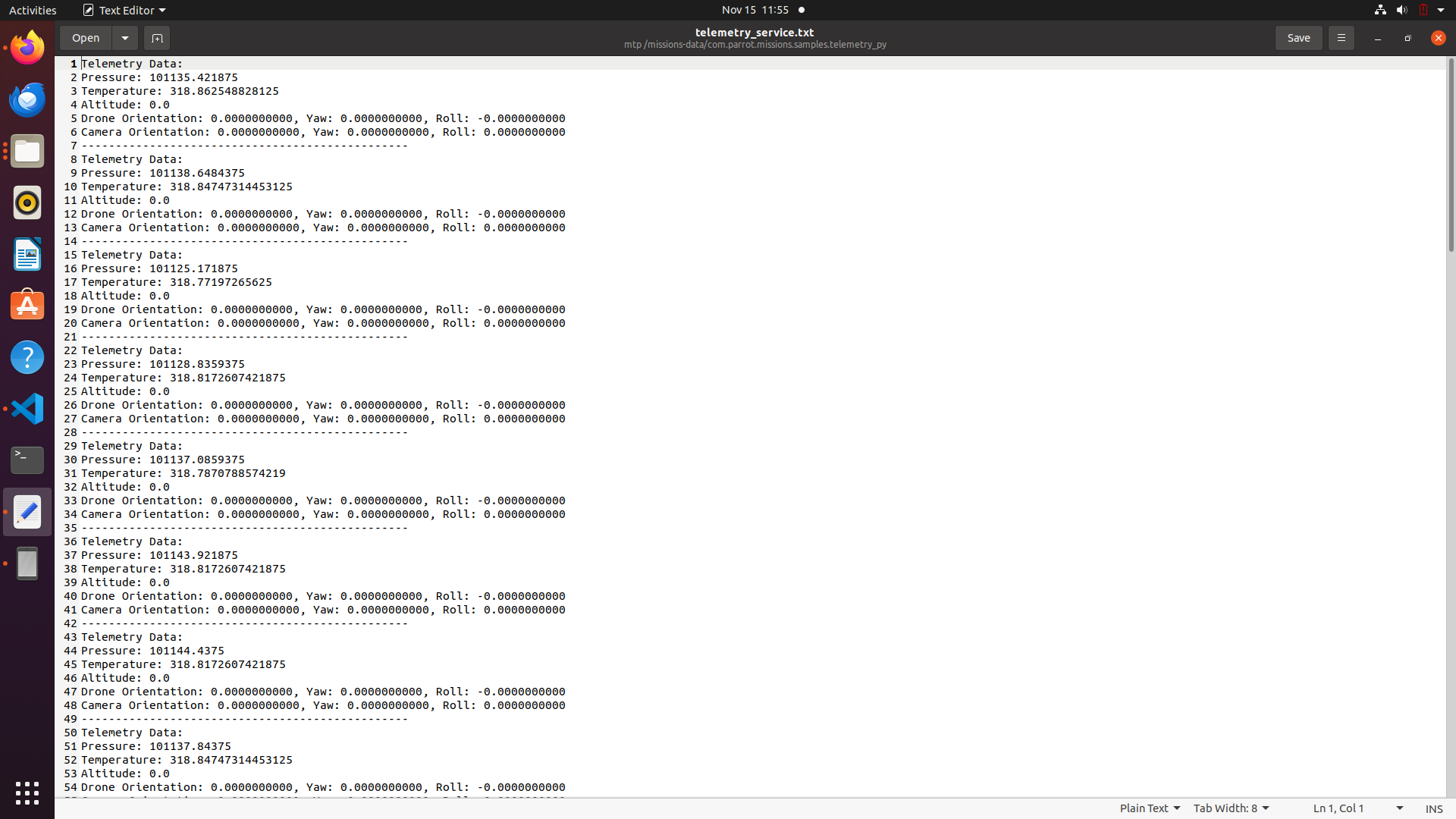
And here is the output I’m getting:
The pitch/yaw/roll is not correctly calculated yet but I don’t think the output should be 0.00000 …
Axelm
November 16, 2023, 1:32pm
4
Hi @kaeladair ,
drone_controller.attitude_ned_q and fcam@eis@video.view_ned_start_q are not arrays (in the documentation, the [] is not present). So, to get these value, you need to register data separately with python:
consumer.reg(drone_attitude_w, "drone_controller.attitude_ned_q.w")
consumer.reg(drone_attitude_x, "drone_controller.attitude_ned_q.x")
consumer.reg(drone_attitude_y, "drone_controller.attitude_ned_q.y")
consumer.reg(drone_attitude_z, "drone_controller.attitude_ned_q.z")
Regards,
system
December 14, 2023, 3:13am
5
This topic was automatically closed after 30 days. New replies are no longer allowed.