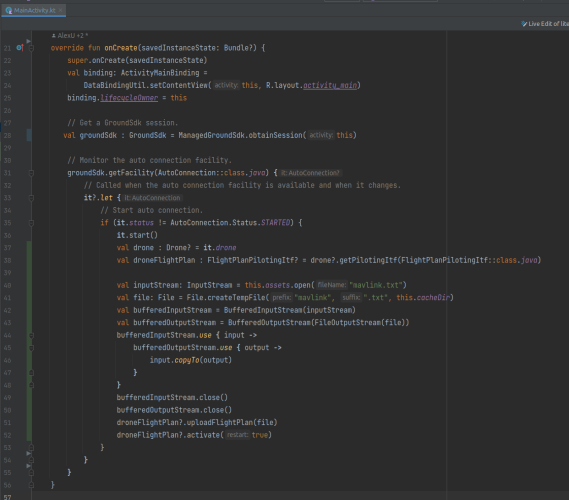
I’ve tried to make the drone execute a predefined flight plan using ground SDK, mavlink file containing the example from the Parrot documentation and Sphinx in order to simulate this action but the drone seems to not respond to the flight data. Here is a code snippet.
Mavlink flight plan file:

With this setup the take-off, landing and move() methods are working fine.
The method activate() (line 52 in the image from slide 3) returns true.
After the activate method has been called we called the method from the last image which returned “UPLOADING” status.
Environment:
- OS: Ubuntu 20.04 (focal)
- Parrot-Sphinx simulator version 2.12.2
- Ground SDK 7.6.0 for Android