Hello everyone!
I would like to have in world moving platform and I use for it , but I see when I use sphinx it turns on in Gazebo version 7. My actor doesnt work and gives me an error: [Err] [MeshManager.cc:95] Invalid mesh filename extension[default] [Err] [Publisher.cc:100] Publishing an uninitialized message on topic[/gazebo/autoladowanie/model/info]. Required field [visual[0].name] missing.
How can I turn on sphinx based by gazebo-9 or how I can add to my world mobile object?
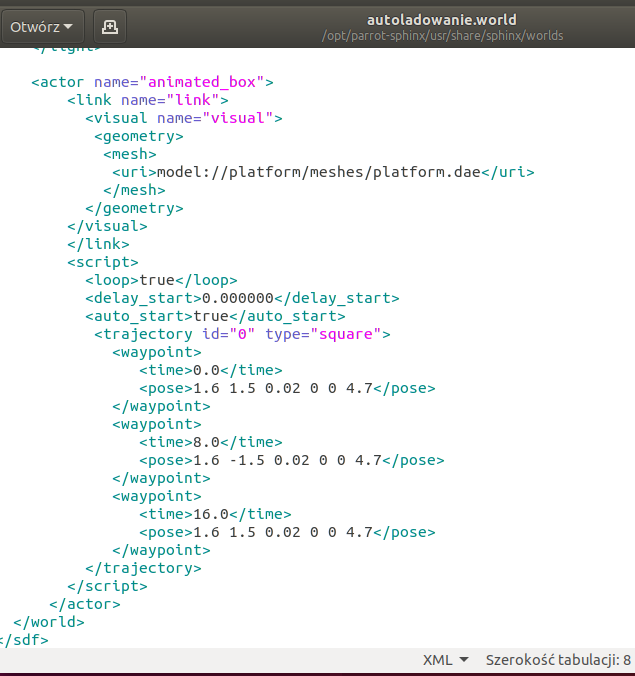
Can you show us the content of your .world file? It looks like one of your models does not have a mesh assigned to one of its visual or collision parts. Note that if you are using a world created for Gazebo 9, it may not work with Gazebo 7. In particular, Gazebo 7 does not support the .obj format.
But I also try make it by method described in this site: Gazebo : Tutorial : Animated Box for version 6.0-7.0, to make simple box and it also doesn’t even open a simulator:
I telemetryd: sighandler: signo=15(Terminated)
I telemetryd: Exiting loop
I tlmblackbox: Closing file ‘./sphinx-11345-log.tlmb’
I telemetryd: Unloading ‘/opt/parrot-sphinx/usr/bin/…/lib/tlm-plugins//tlm-blackbox.so’
I telemetryd: Unloading ‘/opt/parrot-sphinx/usr/bin/…/lib/tlm-plugins//tlm-gndctrl.so’
I : [2018-11-12 11:18:37] [info] asio handle_accept error: asio.system:125 (Operation aborted.)
I : [2018-11-12 11:18:37] [info] Error getting remote endpoint: asio.system:9 (Bad file descriptor)
I : [2018-11-12 11:18:37] [info] asio async_shutdown error: asio.system:9 (Bad file descriptor)
I : [2018-11-12 11:18:37] [error] handle_accept error: Underlying Transport Error
I : [2018-11-12 11:18:37] [info] Stopping acceptance of new connections because the underlying transport is no longer listening.
I telemetryd: Unloading ‘/opt/parrot-sphinx/usr/bin/…/lib/tlm-plugins//tlm-web-gndctrl.so’
(Every method works when I open world file by gazebo command)
EDIT: I also would like to tell that when I add this mesh as a model, it appears in world from sphinx. Maybe it is a way how can I move object adding by ?
Ok, I will try this as soon it will be possibile to me. Another question: why should I run bebop without front camera? When I used it ealier, everything works fine.
Thank you for response